
010-82822099

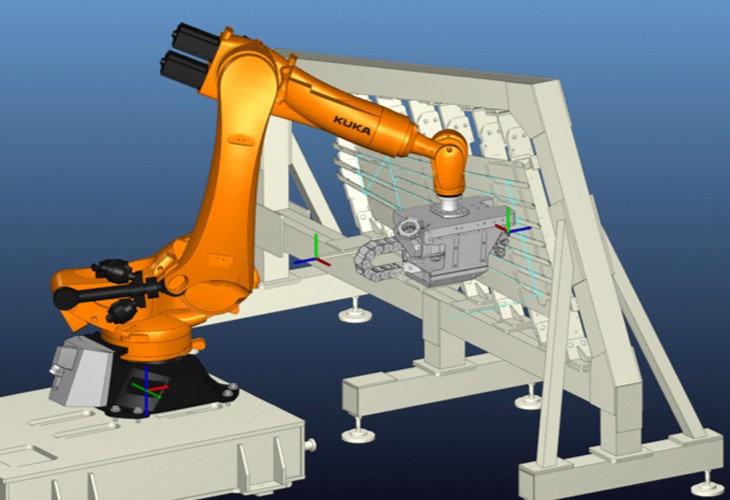
TECHNOLOGY
技术优势

联系我们 Contact Us
Contact Us
联系我们

地址:北京市东城区和平里北街6号26号楼1层102室
电话:010-82822099
市场销售:[email protected]
人员招聘:[email protected]
传真:010-82822099
Copyright © 人工智能版权所有 京ICP备18044113号-1

微信公众号


北京神工科技有限公司
TECHNOLOGY
技术优势
地址:北京市东城区和平里北街6号26号楼1层102室
电话:010-82822099
市场销售:[email protected]
人员招聘:[email protected]
传真:010-82822099
Copyright © 人工智能版权所有 京ICP备18044113号-1